
Introduction
A planetary gearbox with divided rings is a special type of planetary gear system that can provide a really high gear reduction ratio in a very small factor.
In this concept specifically, we achieved a reduction of 180: 1 in a gearbox that has less than a centimeter thick. That is, the engine revolves the solar gear due to a complete rotation in around 20 seconds and translates into a single -hour gear rotation in an hour.
A GARBOX CONCEPT Survey
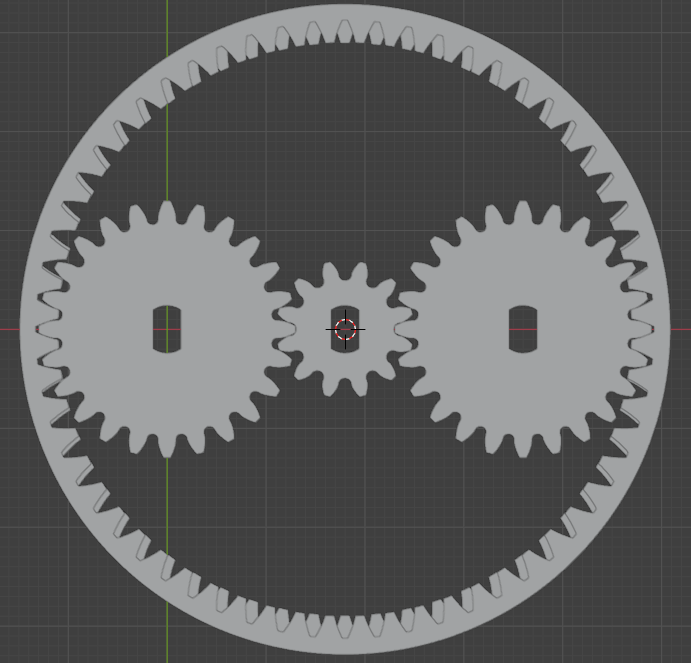
In my design shown below, I have a single solar gear with 12 teeth of the-1 module, two planet gears with 24 teeth of the Module-1 each and two internal ring gears. The ring gear at the top has 60 teeth of the Module-1 and the lower one has the same diameter but has two less teeth and is no longer the technical module. In spite of that, it mixes very well with the gears of the planet because the large diameter and the small difference in the teeth tell, the differentiation in the modules is very small.
Note: The module is M = D / Z, where m is the module, D is the diameter of the YZ tone circle is the number of teeth
The final set of the gearbox reaches a gear reduction ratio of 180: 1. This is a massive reduction. It can be a very slow speed for most applications. It is a slower engine, since I am testing it with a step by step by step 28byj-48. But there is a good reason for its slow speed that consults the application I have in mind for it. I want to achieve a high angular resolution for a stars monitoring application. It will require a slow sidereal movement (a 24 -hour rotation). High speed is not something I need for application.
The 28byj-48 engine has a resolution of 4096 steps in a rotation when delicacies are used. This translates into a resolution of 737,280 steps of the output gear. I would give me a resolution of 1.76 arches. An arcsegondo is a 3600 grade, or a 1,296000 or a complete circle. I suppose this should be a resolution good enough not to stain the stars in the pixels for the field of vision of a 135 mm lens.
The divided rings
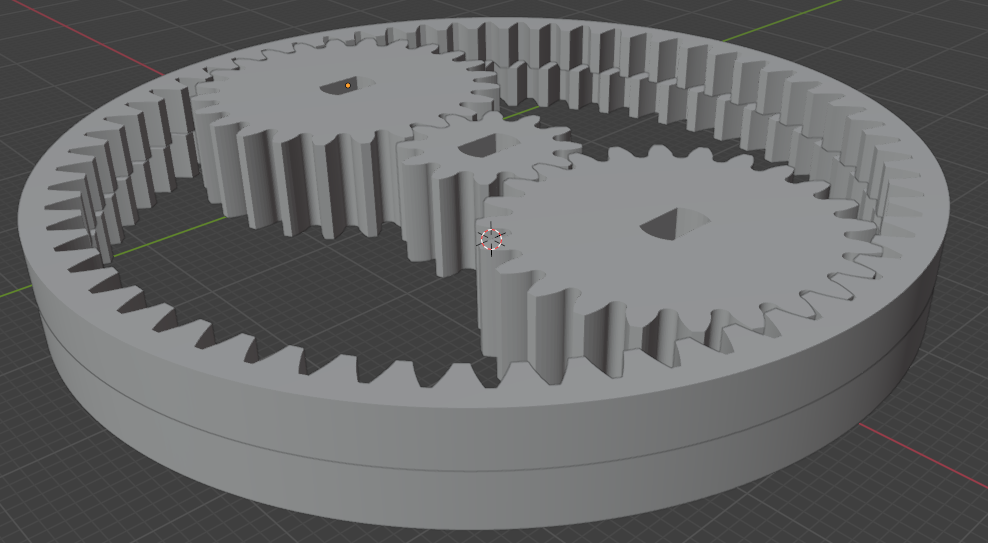
The sun and the planet’s gears are 8 mm thick each. The divided rings are 4 mm thick and stacked with each other.
The ring divided in the upper part has 60 internal teeth and the one below has 58 teeth. The ring at the bottom is fixed, while the upper ring is free to move. This upper ring delivers the output. As seen in the first image, the two rings coincide with the teeth in just two places. These are where the planet slot in the gears.
Gear reduction
There are two gear reduction internships in this gearbox. The first is a simple reduction of planetary gears. This is a reduction 6: 1. That means that 6 rotations of solar gear (12 teeth) are equivalent to a rotation of a planet gear (24 teeth) around the fixed ring (60 teeth).
Stage-1 planetary reduction (i) = 1+(60/12) = 6The second stage transmits the interaction of the planet’s gear with divided rings. Imagine when the planet’s gears move, they open their way while they turn. This makes the free upper ring move so slightly to accommodate the teeth of the planet in space. When the planet’s gear rotates in 180 degrees, the ring turns exactly a teeth.
In the following magnified version, imagine that red teeth are fixed. Blue teeth are free to move. As black (planet gear) pushes its teeth, the blue gear advances very slightly to be evil in the place where the planet’s gear pushes.
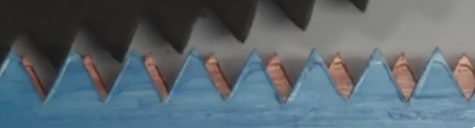
Thus, for when a planet march moves in 360 degrees, the ring gear moves exactly by two teeth. That is 2 of 60 teeth in 360 degrees, or 12 degrees. 30 Revolutions of a planet gear move the ring gear in a circle.
A 6: 1 reduction in the first stage (solar planet), followed by a reduction of 30: 1 in the second stage (planet ring) is equal to a total of the 180: 1 of the sun to the ring.
Infoluntary teeth profile calculation
I used blender to design the gears. I started by calculating the gear teeth profile using this tool: internal/external gear calculator. Connect 24 for the external gear and 60 for the internal gear with a pressure angle of 20 degrees gave me the following equations.
EQUIPMENT PLANET:
x-equation = 11.276 * (cos(u * 0.574) + u * 0.574 * sin(u * 0.574))
y-equation = 11.276 * (sin(u * 0.574) - u * 0.574 * cos(u * 0.574))Internal upper ring gear (60 teeth):
x-equation = 28.191 * (cos((0.2413 + u * 0.237)) + (0.2413 + u * 0.237) * sin((0.2413 + u * 0.237)))
y-equation = 28.191 * (sin((0.2413 + u * 0.237)) - (0.2413 + u * 0.237) * cos((0.2413 + u * 0.237)))I used 24 and 58 to calculate the profiles of the lower gear teeth. Later, I simply increased the gear diameter to match the 60 teeth gear. This slightly changes the module, but not so much that the mesh becomes a problem.
Internal lower ring gear (58 teeth):
x-equation = 27.251 * (cos((0.2360 + u * 0.246)) + (0.2360 + u * 0.246) * sin((0.2360 + u * 0.246)))
y-equation = 27.251 * (sin((0.2360 + u * 0.246)) - (0.2360 + u * 0.246) * cos((0.2360 + u * 0.246)))To obtain the teeth profile equations for the solar gear, I used the same tool and plug 12 for the external internal gear and a pressure angle of 20 degrees.
Solar Team:
x-equation = 5.638 * (cos(u * 0.736) + u * 0.736 * sin(u * 0.736))
y-equation = 5.638 * (sin(u * 0.736) - u * 0.736 * cos(u * 0.736))Modeling of teeth in the blender
I followed this video tutorial to model the gears in the blender. It was a good learning. For the third march, I was frustrated enough and I found an Asier form. The same website has an instant calculator as the striker of a Python script that can be glued in Blender to obtain the full profile instantly in Blender. Follow this link easier: an internal/external gear calculator instantaneous. Using the script in Blender is quite easy, here is a video tutorial on how to use the script and extend the profile to a 3D march, instantly modeling the internal/external gear pairs in the blender.
Even easier, download all STL files here.
3D gear impression
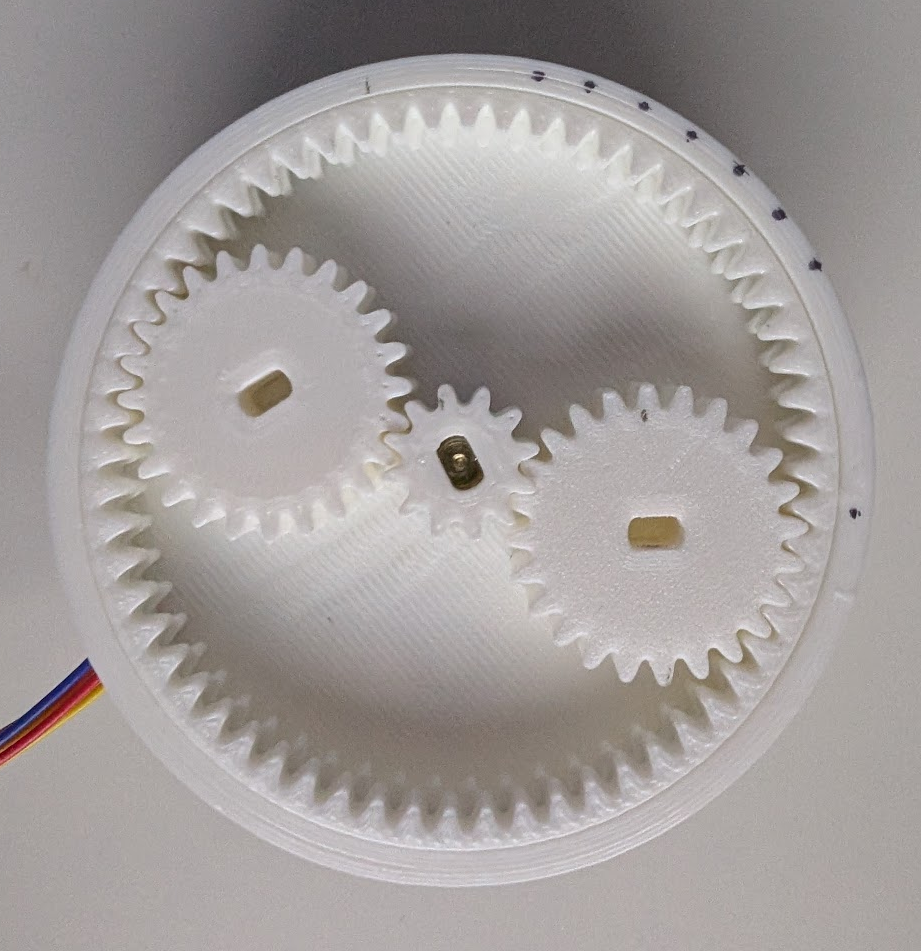
I used Ender 3 and Pla – Pla – 200 ° C nozzle temperature and bed temperature of 50 ° C. Printed most of the best quality with 40% filling. I have thought that a horizontal expansion or -0.15 mm has helped me to obtain the perfect dimensions for the gears to be mixed precisely.
The box is simply a bearer where you put everything. Super stuck the lower ring to the box. In addition, I also hit the engine towards the back with its axis attached inside the gearbox. Here is an image of the finished product.

Next steps
In the next blog I will review Arduino’s configuration so that everything moves. At this stage, the entire box is open at the top. The output ring has no connected output. It is there to simply look and demonstrate the concept of work.
]